Вектор-моментом силы относительно точки O называется
Как известно, результат векторного произ
ведения векторов перпендикулярен каждому
из сомножителей, равен по величине площади параллелограмма, построенного на векторах сомножителях, и направлен в сторону, из которой поворот от первого сомножителя ко второму на наименьший угол виден совершающимся против хода часовой стрелки.
Пара сил
Парой сил называется совокупность двух равных по модулю сил, действующих вдоль параллельных прямых разные стороны.
Теорема:Сумма моментов сил, составляющих пару, относительно произвольного центра не зависит от положения этого центра называется
вектор-моментом пары сил.
Последняя часть этого равенства не зависит от положения точки O, – теорема доказана.
Теорема об эквивалентности пар сил
Две пары эквивалентны, если их моменты равны.
В
силу небольшего количества часов, отведенных на курс теотетической
механики, эту теорему принимаем без доказательства.
Приведение пространственной системы сил к
простейшему виду
Докажем вначале лемму: Не изменяя действия силы на твердое тело, ее можно перенести с линии действия, параллельно самой себе, добавляя при этом пару моментом, равным моменту исходной силы относительно новой точки приложения силы.
Рассмотрим силу , приложенную в точке А. Выберем произвольно точку В, ней приложим две силы, и , так, что модули всех трех сил равны и они параллельны.
Очевидно силы и образуют уравновешенную систему, поэтому можно добавить их системе. Силы и образуют пару сил, итоге получаем силу пару сил .
Рассмотрим произвольную систему сил.
Система состоит из сил , приложенных в точках . Выберем точку О, дальнейшем будем называть ее центром приведения системы сил, и перенесем последовательно эту точку все силы системы, добавляя всякий раз пару c моментом, равным моменту исходной силы относительно новой точки приложения силы. После переноса силы обозначение добавляем «'», чтобы отличать исходную силу от той же силы новом положении, пару силы обозначаем . Силы, приложенные точке О, можно сложить получим силу Вектор-моменты пар тоже можно сложить получим одну пару, равную
сумме моментов всех исходных сил относительно центра О.
Здесь введены обозначения: – главный вектор системы сил; – главный момент системы сил относительно центра О.
Очевидно что главный вектор системы сил не зависит от положения центра приведения, главный момент системы очевидно меняется при изменении центра приведения. Заметим, что проекция главного момента
на направление главного вектора системы тоже не зависит от положения центра приведения, но доказывать это не будем.
Вывод
Система сил эквиваленна совокупности одной силы, – главного вектора и
системы одной пары, – главного момента системы.
Анализ возможных вариантов
1.
– система уравновешена.
2.
– система приводится к равнодействующей.
3. – система приводится паре сил.
4. – здесь возможно несколько подслучаев.
a) – сила и пара направлены вдоль одной прямой, в этом случае говорят, что система сводится к динаме.
b) – система приводится равнодействующей, но линия действия равнодействующей не проходит через центр приведения. Докажем это.
Пара и сила перпендикулярны. Силы, составляющие
пару, можно расположить так, как это показано на чертеже – и силы, составляющие пару. Модули всех трех сил можно сделать равными. Можно изменять
направление сил, составляющих пару, их модули,
расстояние между линиями действия так, чтобы не изменялся момент пары.
c) – в этом случае система сил приводится динаме, но ось динамы не проходит через точку приведения.
В
этом случае мы можем представить вектор виде суммы двух векторов, – одного перпендикулярного к , и другого, параллельного
. Пара, перпендикулярная , и сила приводятся одной силе (см. случай b), линия действия которой не проходит
через точку О. В дополнение этой силе остается пара, ей параллельная вместе они образуют динаму.
Условия равновесия
1. В случае произвольной пространственной системы сил из векторных
условий
Вытекают 6 скалярных условий:
2. Произвольная плоская система сил (все силы системы лежат в плоскости
xy).
В
этом случае лежит плоскости xy, а параллельно оси z.
Тогда в скалярном виде уравнения равновесия примут вид:
3. Система сходящихся сил. Линии действия всех сил пересекаются одной точке. Если в качестве центра приведения выбрана точка пересечения
линий действия сил системы, то и остается три условия
равновесия:
В случае системы сходящихся сил на плоскости остается 2 скалярных уравнения равновесия:
 Вектор-моментом силы
Вектор-моментом силы 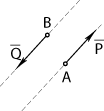 Парой сил называется совокупность двух равных по модулю сил, действующих вдоль параллельных прямых разные стороны.
Парой сил называется совокупность двух равных по модулю сил, действующих вдоль параллельных прямых разные стороны. 



 Докажем это.
Докажем это. 